- Блок управления шаговым двигателем
- Схема управления шаговым двигателем.
- Программы управления шаговыми двигателями
- Полношаговый алгоритм работы шагового двигателя
- Количество шагов шагового двигателя
- Типы шаговых двигателей
- Шаговый двигатель с постоянными магнитами
- Шаговый двигатель с переменным магнитным сопротивлением
- Гибридный шаговый двигатель
- Как работает гибридный двигатель
- Режим полшага
- Биполярные и униполярные шаговые двигатели
- Управление шаговым двигателем
За какое-то время у меня скопилось много шаговых двигателей, но все не было времени ими заняться, а ведь шаговый двигатель вещь довольно интересная и полезная. Но у многих радиолюбителей возникают проблемы с запуском таких двигателей, вот я и решил собрать контроллер для проверки наиболее часто распространённых шаговых двигателей.
Блок управления шаговым двигателем
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины (см. Рис.1). Их устанавливают в такие аппараты, как принтер, копир, дисковод и т.д.
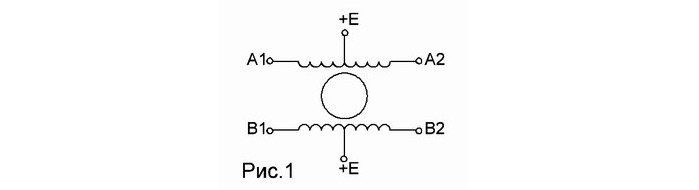
Схема управления шаговым двигателем.
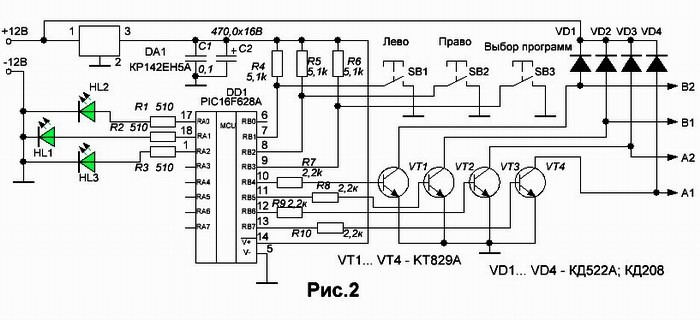
На рисунке 2 представлена схема управления шаговым двигателем.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
- Можно определить количество шагов.
- Определить один из двух алгоритмов работы двигателя.
- Опробовать работу двигателя в полушаговом режиме.
- Можно опробовать работу в полношаговом режиме.
Еще раз повторюсь, что разновидностей шаговых двигателей много и данный контроллер подойдет не для всех.
Программы управления шаговыми двигателями
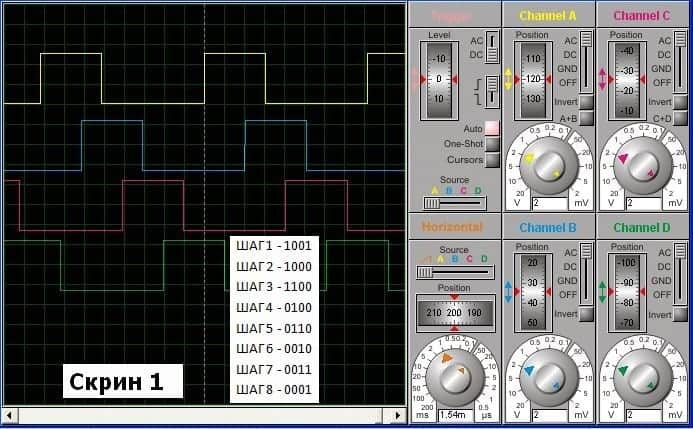
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен загореться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
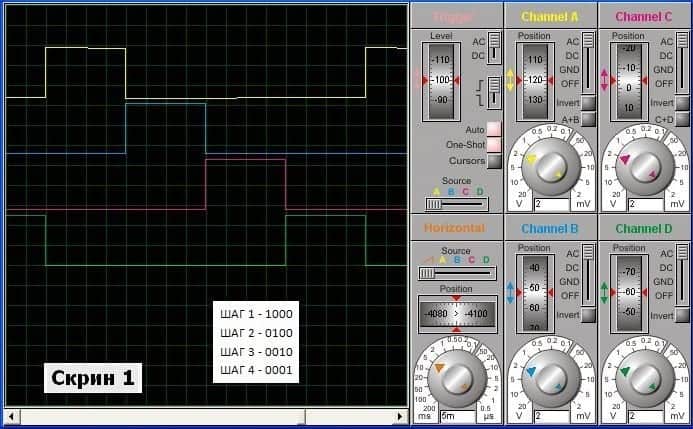
Возможно, придется экспериментировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Полношаговый алгоритм работы шагового двигателя
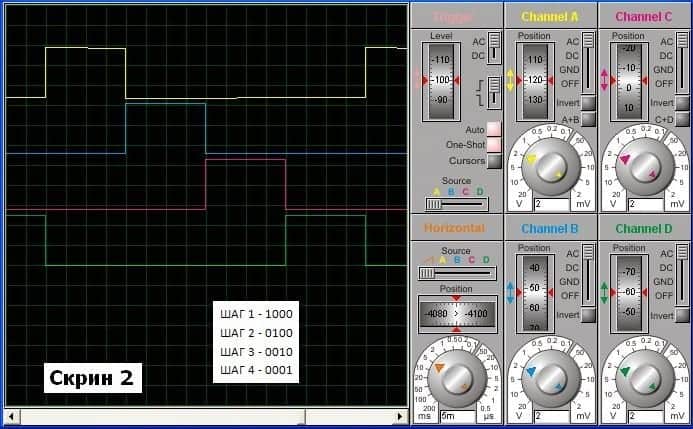
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полно шаговому алгоритму, показанному на скрине 2.
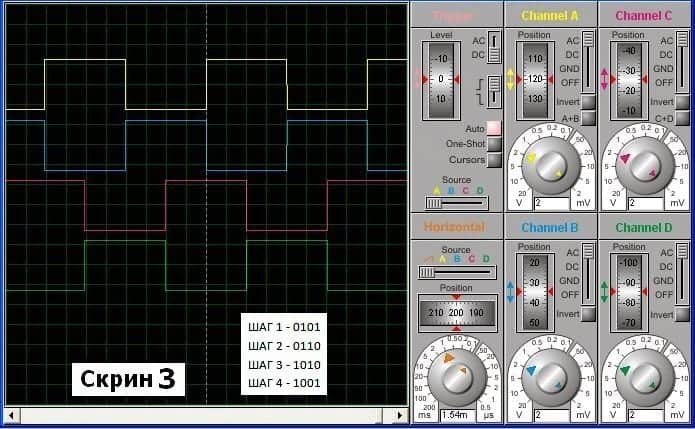
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Количество шагов шагового двигателя
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
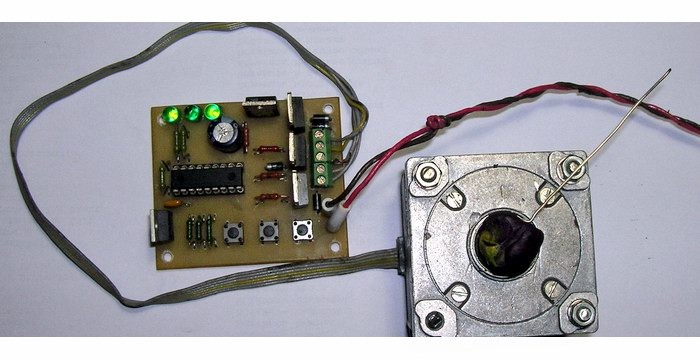
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать по ссылке ниже.
Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.
Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания. Шаговые двигатели получили широкое распространение в технике, к примеру, их можно найти в гибких дисководах, сканерах и принтерах. Существует несколько типов шаговых двигателей.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами

Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением

В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель

Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.

Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.

Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
 Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.

Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.

Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис. в). При определенном соединении этих обмоток подобный шаговый двигатель возможно использовать как биполярный либо униполярный. Кстати, униполярный двигатель, имеющий две обмотки с отводами по середине, возможно использовать и как биполярный. В этом случае провода, идущие от середины обмоток не используются.
Управление шаговым двигателем
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов — 200/об., ток обмотки – 0,5А, мощность — 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
 Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
 Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В ней используются три микросхемы К561ЛА7 и одна К561ТМ2. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТ829А, способные выдерживать ток до семи ампер.
При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону. Кнопки использованы двойные, поэтому при их отпускании размыкается и цепь питания обмоток шагового двигателя, что исключает протекание сквозных токов при остановке двигателя. Но есть ситуации, когда для удержания ротора двигателя в нужном положении, необходимо, чтобы через одну из обмоток протекал удерживающий ток. В этом случае контроллер должен автоматически понизить напряжение питания обмоток двигателя до необходимой величины. В данной схеме этой опции нет, здесь напряжение питания снимается с обмоток двигателя полностью.
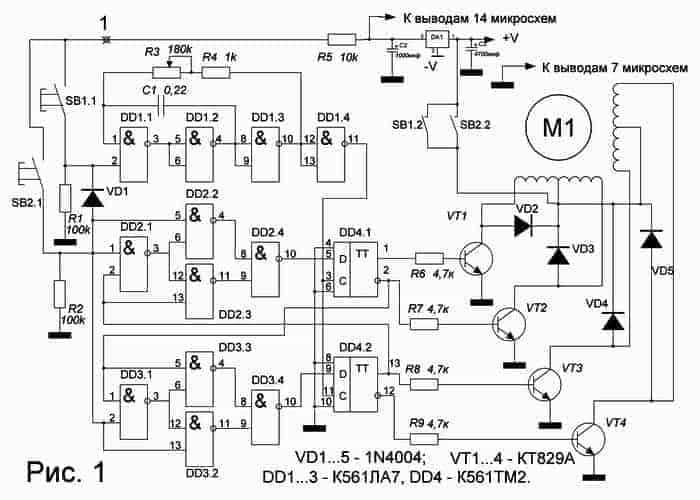
На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. На микросхемах DD2 и DD3 собраны логические элементы «исключающие или» и совместно с двумя триггерами DD4.1 и DD4.2, микросхемы К561ТМ2, образуют схему двухразрядного кольцевого счетчика для коммутации обмоток. Схема обеспечивает работу шагового двигателя в полушаговом режиме. Осциллограммы импульсных последователей полушагов показаны на скриншоте 1. Все обмотки двигателя зашунтированы демпфирующими диодами, устраняющими коммутационные выбросы напряжения. Микросхемы питаются через стабилизатор напряжения DA1 — КР142ЕН8Б. Максимальное входное напряжение этой равно35В. Так что и максимальное напряжение питания двигателя будет равно 35В.
Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь.