Многообразие материалов на эту тему практически не оставляет шансов на оригинальность, но кое-что можно представить, дабы сократить время на поиск нужных решений и обозначить «подводные камни». И прежде всего представить практическое, без академичности, которая векторными диаграммами управления и матрицами отпугивает многих, а привлекает только тех, кому нужен реферат потолще.
Необходимо отметить, что выбор индуктивной нагрузки, коей является двигатель, вовсе не отвергает данное решение для управления освещением или нагревательными элементами. Двигатель, достаточно капризный элемент и не всякий подходит для данной схемы. И более того, режим плавного управления мощностью двигателя не всегда удается осуществить. Это зависит от многих факторов: мощность двигателя, инерционность нагрузки на валу, реактивные и активные параметры обмоток. Для надёжного решения всех этих проблем предназначены частотные инверторы. Тем не менее, данная схема значительно проще по сложности, чем частотное управление и иногда обеспечивает приемлемые результаты.
Вот совокупность всех аспектов проблемы управления:
- Прежде всего, слово «микроконтроллер» в заглавии статьи, говорит о том, что управлять нагрузкой необходимо не потенциометром, (таких решений предостаточно), а именно микроконтроллером.
- Обязательное наличие гальванической развязки.
- Плавное управление мощностью, а не старт-стопное.
- Контроль перехода через ноль (Zero-Cross).
- Некоторые особенности выбора сглаживающего фильтра RC snubber.
- Программная реализация событий управления на примере Atmega16A.
- Обзор аналогичных решений в Интернете.
Схема 1. Узел управления нагрузкой.
Схема 2. Датчик перехода через ноль (Zero-Cross).
Цепи:
- VCC – 5 вольт, питание низковольтной части узла, полученное стабилизатором напряжения;
- GND – общая точка низковольтной части;
- DRV – выход микроконтроллера, для управления нагрузкой (PC6 для Atmega16A);
- ZERO – вход TTL-сигнала (PD2/INT0 для Atmega16A) от события перехода через ноль сети 220;
- L,N – фаза и нейтраль сети 220;
Элементы:
- MOC3052 – оптотриак (симистор), обеспечивающий гальваническую развязку;
- BT136 – триак (симистор), обеспечивающий управление мощной нагрузкой;
- BC847 – транзистор, управляющий MOC3052;
- R1,R2 – делитель, запирающий транзистор по умолчанию.
- RS,CS – сглаживающий фильтр RC snubber, необходимый только для индуктивной нагрузки.
- PC814 – оптрон датчика Zero-Cross;
- RZ0,RZ1 – токозадающие резисторы, двухваттные;
- SN74HC14D – триггер Шмидта, для повышения помехоустойчивости;
- М – двигатель, схема включения типа «звезда»;
- CF – фазосдвигающий конденсатор.
Диаграмма фазового управления.
Оптрон PC814 обладает той особенностью, что содержит два внутренних светодиода, и реагирует на разнополярное напряжение при токе 10 мА. Поэтому характер импульсов сигнала ZERO именно такой, как показано на диаграмме. На токозадающих сопротивлениях RZ0 и RZ1 падает практически всё напряжение питающей сети, поэтому на их ваттности не надо экономить. Вместо двух последовательных сопротивлений можно использовать одно, соответствующего типа.
Сигнал ZERO попадает на микроконтроллер PD2/INT0 и вызывает аппаратное прерывание ниспадающим фронтом. Как будет показано далее, программа обработки прерывания запускает счетчик, время работы которого и будет определять фазовую задержку включения симистора относительно события перехода через ноль. Сигнал DRV формируется этой задержкой. На диаграмме показано, что передний фронт сигнала DRV смещается так, что энергетика на нагрузке уменьшается синхронно, через каждые 10 миллисекунд. Этого можно достичь только программным способом.
Если задача управления нагрузкой простая (включить/выключить) , то датчик Zero-Cross можно и не применять. Однако его использование уменьшает помехи при коммутации сильноточной нагрузки, да и режим, в котором пребывает силовой симистор более щадящий и он меньше нагревается. Используя данный подход в полном объеме, можно строить достаточно сложные воздействия на двигатель.
В представленной схемотехнике имеется один не большой «подводный камушек», о который можно споткнуться. При инициализации микроконтроллера может пройти достаточное время, это связано с конкретной задачей, когда его выходные сигналы находятся в третьем состоянии. В течении этого времени необходимо запереть транзистор BC847. Иначе возможен скачек напряжения, который пройдет на нагрузку.
Сглаживающий фильтр RC-snubber.
Необходимо иметь в виду, что при отключении и включении симистора из-за реактивного сопротивления обмоток может возникать короткий бросок и даже затухающие колебания на нагрузке. Для предотвращения этих бросков служит фильтр RS, CS. В литературе по триакам приводятся номиналы этих элементов: RS = 39 Ом, CS = 0.01 мкФ. При этом для мощности RS нет рекомендаций. Мой практический опыт говорит о том, что сопротивление RS горит так, что выгорает весь узел с симистором. При этом оборудование испытывалось, собственные колебания подавлены, работа стабильная, но иногда у заказчика происходит пробой узла. Причины этих возгораний носят случайный характер и систематизации не поддаются. Можно только предположить, что причиной может быть не сам узел симистор – двигатель, а наводимая на него через питающую сеть импульсная помеха от другого оборудования.
И так, для подавления собственных колебаний представленные номиналы вполне оправданы, и вообще-то не критичны. RS должно быть того же порядка, что и активное сопротивления двух обмоток (схема «звезда»). Собственные колебания могут быть от 1 до 10кГц. На этой частоте реактивное сопротивление CS от 16кОм до 1.6кОм, поэтому всё напряжение приложено к CS. Гораздо хуже, когда возникает внешняя импульсная помеха, её параметры не известны.
Поэтому мои рекомендации таковы:
RS эквивалентно активному сопротивлению обмоток, а мощность не менее двух ватт. CS большего номинала чем 0.01 мкФ, с напряжением 400V и более.
Вот здесь есть интересные материалы на эту тему:
Программная реализация управления.
Пример программы реализован в проекте AVR-studio Ver 4.18 build 716.
- Частота процессора 8 МГц внутренняя без кварца.
- Регистр счетчика TCCR2 настроен на внутреннее прерывание с периодом 20 мкс.
- Программа обработки этого прерывания SIGNAL(SIG_OUTPUT_COMPARE2) вызывает процедуру drv_act().
- Процедура drv_act() в зависимости от флага drv_faza0 запускает счетчик задержки относительно момента перехода через ноль.
- Процедура обработки прерывания SIGNAL (SIG_INTERRUPT0) от датчика Zero-Cross управляет флагом drv_faza0.
- Весь период полуволны в 10 мс разбивается на 500 значений задержки.
- В массиве pwm_array[] заранее формируется набор задержек. Перебор индекса массива происходит в программе обработки прерывания SIGNAL (SIG_INTERRUPT0).
Более подробно см. проект.
Ниже будет описано, что можно получить, манипулируя полуволнами, но автор, работая над реальным проектом управления двигателем, не ограничился статическими значениями задержек. Для более стабильного результата была реализована следящая система поддержания заданных оборотов двигателя на основе тахометра. Программно это поддержано в процедуре NormalCtrl(), но описания этой части не входит в рамки данной статьи.
Управление двигателем с помощью манипуляций полуволнами.
- Двигатель: асинхронный , 3 фазы, 250 Ватт, 220 В, 2730 об/мин, тип АИР56В2N3.
- Фазосдвигающий конденсатор CF = 10мкФ х 400 В.
- Активное сопротивление каждой обмотки Ra = 39 Ом.
- RS = 46 Ом, CS = 0.22 мкФ.
- Двигатель не нагружен, холостой ход.
- Напряжения снимались через резистивный делитель относительно нейтрали N.
На диаграммах 1,2,3 зелёный график – напряжение на нагрузке (LOAD), жёлтый график – точка между сопротивлением RZ1 и PC814, она показывает реальные моменты перехода через ноль.
При определённой задержке фазы включения симистора, близкой к той, что показана на диаграмме 1, наблюдалась устойчивая работа двигателя на оборотах в два раза меньше максимальных. Однако незначительное уменьшение этой задержки, приводило к тому, что двигатель, постепенно разгоняясь, выходил на полные обороты и симистор открывался полностью, игнорируя управляющее воздействие.
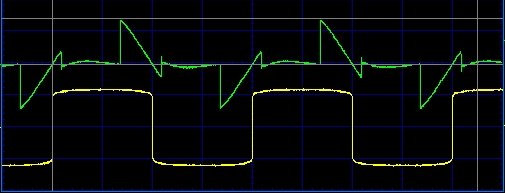
Диаграмма 1. Начало вращения, постепенный набор оборотов.
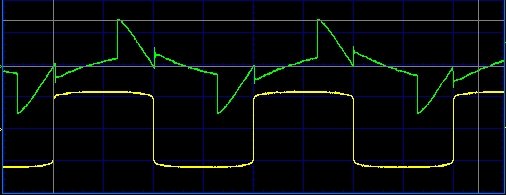
Диаграмма 2. Обороты, близкие к максимальным, вырождение участков закрытого симистора.
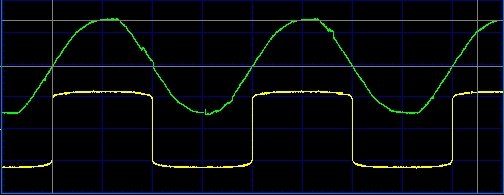
Диаграмма 2. Обороты максимальные, симистор открыт.
Можно предположить, что срыв работы симистора, как управляющего элемента, объясняется динамическим изменением реактивной составляющей сопротивления обмоток двигателя, в результате чего симистор переходит в открытое состояние. К этим сложностям добавляется то обстоятельство, что неустойчивость симистора так же зависит и от момента на валу двигателя. Если удалось подобрать фазы задержек на холостых оборотах, то при нагрузке для устойчивой работы эти параметры будут совершенно иными.
Однако же заставить работать двигатель на оборотах, кратных максимальным можно. Получить достаточно плавную регулировку, правда, не получится. Самое же проблематичное это получить вращение двигателя при оборотах в диапазоне 0.75MAX
 Бытовые электроприборы в наших домах подключаются к одной из фаз трехфазного переменного тока напряжением 220 В и частотой 50 Гц. Часто бывает необходимо регулировать мощность и напряжение на входе.
Бытовые электроприборы в наших домах подключаются к одной из фаз трехфазного переменного тока напряжением 220 В и частотой 50 Гц. Часто бывает необходимо регулировать мощность и напряжение на входе.
Простейший регулятор мощности можно сделать на трансформаторе.
Способы регулирования мощности
 Соотношение напряжения на входе и выходе определяется числом витков в первичной и вторичной обмотках. Сделав много отводов на вторичной обмотке, можно осуществить ступенчатое регулирование. По такой схеме работают релейные стабилизаторы напряжения.
Соотношение напряжения на входе и выходе определяется числом витков в первичной и вторичной обмотках. Сделав много отводов на вторичной обмотке, можно осуществить ступенчатое регулирование. По такой схеме работают релейные стабилизаторы напряжения.
Плюсов у такой схемы немало. В первую очередь, это ее простота. А также высокий КПД трансформатора, гальваническая развязка входа и выхода, чисто синусоидальная форма выходного тока.
Однако, на частоте сети 50 Гц мощные трансформаторы становятся тяжелыми и громоздкими, невозможно плавно регулировать мощность, определенные проблемы возникают при коммутации обмоток.
Другой способ регулирования мощности называется методом фазового регулирования. При этом способе нагрузка подключается к источнику через электронный ключ.
Ключ прерывает цепь питания на определенную долю периода синусоиды переменного тока. Меняя время закрытого состояния ключа, можно регулировать величину мощности, передаваемой в нагрузку и действующее значение напряжения на выходе.
Принцип работы тиристорного ключа
 Для работы в режиме фазного регулирования надо открыть ключ с некоторой задержкой относительно начала полупериода и оставить его в открытом состоянии до конца полуволны, когда ток будет переходить через 0.
Для работы в режиме фазного регулирования надо открыть ключ с некоторой задержкой относительно начала полупериода и оставить его в открытом состоянии до конца полуволны, когда ток будет переходить через 0.
Для этой цели как нельзя лучше подходят приборы из семейства тиристоров.
Тиристор очень похож на биполярный транзистор. У него тоже три электрода: анод, катод и база. Он также управляется базовым током. Но в отличие от биполярного транзистора, тиристор сохраняет открытое состояние и после снятия управляющего сигнала до того момента, пока ток через него не снизится практически до нуля. Это и нужно для реализации схемы фазового регулирования.
Симистор как симметричный тиристор
 Тиристор — прибор с тремя p-n переходами. Структура тиристора имеет вид p-n-p-n или n-p-n-p. То есть, как и транзисторы, тиристоры бывают прямой и обратной проводимости. Тиристорный ключ проводит ток в одном направлении в зависимости от своего типа.
Тиристор — прибор с тремя p-n переходами. Структура тиристора имеет вид p-n-p-n или n-p-n-p. То есть, как и транзисторы, тиристоры бывают прямой и обратной проводимости. Тиристорный ключ проводит ток в одном направлении в зависимости от своего типа.
Если соединить два тиристора с разными типами проводимости параллельно, объединив управляющие входы, мы получим симметричный тиристор — симистор. Он работает точно так же, как и тиристор, но пропускает ток в обоих направлениях.
В качестве примера можно взять отечественный симистор КУ208Г.
Характеристики симистора:
- Максимальное напряжение — 400 В;
- Максимальный ток в открытом состоянии (импульсный) — 10 А;
- Напряжение на открытом ключе — 2 В;
- Максимальный ток отпирания не более — 160 мА;
- Предельная скорость нарастания напряжения — 10 В/мкс;
- Максимальная рабочая частота — 400 Гц.
Динистор как симистор без управляющего входа
 Симистор без управляющего входа называется динистором. Характеристика динистора приведена на рисунке ниже.
Симистор без управляющего входа называется динистором. Характеристика динистора приведена на рисунке ниже.
Из нее следует, что динистор работает наподобие разрядника. Когда напряжение между его катодом и анодом превышает определенную величину, он переходит в открытое состояние и начинает проводить ток. Динистор удобно использовать для управления тиристорными ключами.
Простейшая схема симисторного регулятора
Рассмотрим самую простую схему симисторного регулятора напряжения.
В этой схеме всего пять элементов, но она вполне работоспособна. Время заряда емкости регулируется переменным резистором.
Когда напряжение на конденсаторе достигнет уровня примерно 30 В, динистор начинает проводить ток и открывает симистор, который остается в открытом состоянии до конца полупериода, когда ток начнет переходить через 0. Затем цикл повторяется уже с другой полярностью.
Это универсальная схема. Она может применяться для самых разных нагрузок. Для управления индуктивными нагрузками, такими как двигатель пылесоса, необходимо защитить симистор от бросков напряжения при выключении варистором и RC-цепочкой, присоединенными параллельно симистору.
Использование микросхемы К1182 ПМ1
 Для построения тиристорных и симисторных регуляторов выпускается специальная микросхема К1182 ПМ1. На кристалле микросхемы реализована почти законченная схема фазового регулятора мощности.
Для построения тиристорных и симисторных регуляторов выпускается специальная микросхема К1182 ПМ1. На кристалле микросхемы реализована почти законченная схема фазового регулятора мощности.
Два тиристора включены параллельно и навстречу друг другу. Их управляющие входы подключены чрез развязывающие диоды к выходу блока управления. Встроенный диодный мост вырабатывает напряжение питания для блока управления.
На выводы AC1 и AC2 подается напряжение 220 В. К выводам UST1+ и UST2+ подключаются конденсаторы, формирующие задержку включения тиристоров. К выводам С+ и C- подключается элемент управления — переменный резистор или RС цепочка.
Ниже приведены рекомендованные производителем схемы включения маломощных нагрузок непосредственно к микросхеме.
При необходимости подключения мощных нагрузок используются внешние тиристоры или симисторы.
Вариант с двумя тиристорами.
Вариант с симистором.
Микросхема выпускается в трех типах корпусов:
- 16 выводной Power DIP-(12+4);
- 8 выводной DIP-8;
- 8 выводной планарный SO-8.
Собрать симисторный регулятор мощности своими руками может любой радиолюбитель.
Регулятор мощности на микроконтроллере
 В последнее время стало модным использовать для управления самыми разными устройствами микроконтроллеры. Микроконтроллеры, представляющие собой микрокомпьютер на кристалле, обвешанный к тому же и встроенными таймерами, АЦП, ЦАП и тому подобными устройствами, представляют разработчикам практически неограниченные возможности.
В последнее время стало модным использовать для управления самыми разными устройствами микроконтроллеры. Микроконтроллеры, представляющие собой микрокомпьютер на кристалле, обвешанный к тому же и встроенными таймерами, АЦП, ЦАП и тому подобными устройствами, представляют разработчикам практически неограниченные возможности.
Вариант реализации симисторного регулятора мощности на микроконтроллере ATmega 8 приведен ниже.
Особенностью схемы является использование оптоэлектронных микросхем для гальванической развязки схемы управления и силовых цепей. Микроконтроллер имеет собственное питание, условно обозначенное на схеме батарейкой. Диодный мост служит двуполупериодным выпрямителем, к выходу которого через оптопару подключен вход контроллера. На этом входе контроллера формируется сигнал в начале каждого полупериода сетевой частоты. Мощный тиристор подключается к выходу контроллера через оптический элемент — оптосимистор.
Кнопками подаются сигналы на увеличение или уменьшение мощности. Оптические элементы обеспечивают необходимый уровень изоляции цепей управления от высоковольтной части схемы. Интеллект микроконтроллера позволяет строить и более сложные схемы, например, схему трехфазного регулятора мощности.
Управление нагрузкой симистором.
Всем привет! Собрал по типовой схеме этот узел, фазовое управление нагрузкой микроконтроллером (в.
Хитрое управление симистором.
Управляю нагрузкой с помощью симисторов. Схема: .
управление симистором, посоветуйте оптопару
==================== UPD. В общем и целом выбираю конечно решение на BTA16, как советуют .
Управление симистором напрямую от МК +бестрансформаторный БП
Друзья, поделитесь опытом – есть у меня самодельная система управления нагрузкой построенная на.
Управление BT131-600 симистором
Приветствую. НЕ могу понять что не так. Имеется китайский вентилятор у которого обмотки.
Равно как и с оптопарой без детектора.
Добавлено через 1 минуту
Есть разница в подключении для различного вида нагрузок?
Необходимо реализовать ПИД-управление нагревательным элементом. Если вы спрашиваете чтоб узнать не подойдет ли здесь реле – нет, не подойдет.
_SayHello, Спасибо. То есть, мне необходимо отлавливать 0 микроконтроллером, например, с помощью отдельной оптопары? Если так, то выходит, необходимо использовать АЦП? Или есть методы отлавливания нуля микроконтроллером, с использованием ТТЛ? И если так, то почему нельзя использовать этот оптосимистор?
Мощностью можно управлять несколькими способами: 1) Регулировать фазу открытия симистора на каждом периоде сети.
2) Можно регулировать количеством периодов сети.
Второй вариант будет попроще, но и по-грубее, к примеру мы знаем что период сети +- 20 мс ( 50 Гц),
пусть 100 периодов из 100 у нас 100% мощность. Значит мы считаем выход ПИД регулятора в % мощности, например получилось 50%. 20 мс * 50 = 1 с. Таким образом мы выставляем на 1 секунду лог. единицу, симистор откроется при переходе через 0 сам, через одну секунду сняли лог. единицу, симистор закроется сам при переходе через ближайший 0. В таком случае можно использовать оптопару с встроенным детектором нуля. Правда если характер нагрузки резистивный. При индуктивном характере момент включения лучше сдвигать относительно перехода 0 на четверть периода. Погрешность данной регулировки может быть в пол периода, так как мы включаем в произвольное время, и считаем что нагрузка уже работает, а на самом деле она еще будет дожидаться ближайшего перехода через 0.
В первом варианте уже сложнее, тут надо точно знать момент перехода через 0, а оптопары обратной связи по этому параметру не дают. По этому, необходимо использовать внешнюю цепь детектора нуля, погугли – их миллион. Я использовал простейшую из пары резисторов и оптопары. Подобные схемы при переходе через 0 в большинстве случаев выдают фронт, который можно повесить на внешнее прерывание, или на Input Capture таймера. В прерывании по приходу фронта уже может выставляться необходимая задержка по фазе по которой на управляющую оптопару будет подаваться строб включающий нагрузку до конца данного периода. Если использовать IC таймер у контроллера, то параллельно можно высчитывать период сети ( время между двумя фронтами) и делать поправку на период сети, ибо он немного, но "плавает". + строб приходит не точно в момент перехода сети через 0, а через определенное время, обусловленное падением напряжения на диоде оптопары детектора нуля в прямом направлении. Например, падение в прямом направлении на диоде составляет 0.6 В, напряжение сети изменяется по синусоидальному закону с частотой 50 Гц, с действующим значением 220 В. Отсюда можно посчитать амплитуду синуса, и прикинуть за какое время сигнал на входе оптопары вырастет от 0 до 0.6 В и оптопара откроется – это и будет время, которое также можно учитывать, чтобы увеличить точность регулирования. Конечно, амплитуда сети тоже может изменяться, тем самым будет и задержка меняться, можно и этот параметр контролировать, но то уж как глубоко вы готовы зайти.