Силы упругости возникают при деформации тел.
Вычисление силы упругости производится по закону Гука :
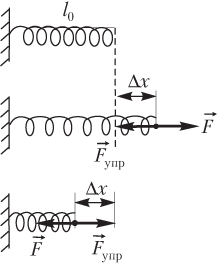
где k — коэффициент жесткости (упругости) пружины; Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l 0 — длина пружины в недеформированном состоянии, l — длина растянутой (или сжатой) пружины.
Направление силы упругости F → упр (рис. 2.9) противоположно направлению силы, вызывающей деформацию:
Относительная деформация определяется отношением:
ε = Δ x l 0 или ε = Δ x l 0 ⋅ 100 % ,
где Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l 0 — длина недеформированной пружины, l — длина растянутой (сжатой) пружины.
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости вычисляется для последовательного соединения по формуле (рис. 2.10)
1 k = 1 k 1 + 1 k 2 + . + 1 k N ;
где k 1 , k 2 , . k N — коэффициенты жесткости (упругости) этих пружин.

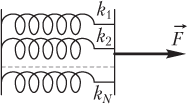
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости (рис. 10), вычисляется для параллельного соединения по формуле (рис. 2.11)
k = k 1 + k 2 + . + k N ,
где k 1 , k 2 , . k N — коэффициенты жесткости (упругости) этих пружин.
- для последовательного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k 0 :
для параллельного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k 0 :
Пример 16. При последовательном соединении трех пружин, коэффициенты жесткости которых относятся как 1 : 2 : 3, сила 12 Н вызвала растяжение системы на 4,0 см. Рассчитать коэффициенты жесткости указанных пружин.
Решение. Величина силы упругости, действующей на пружину, определяется формулой
F упр = k общ ∆ x ,
где k общ — коэффициент жесткости составной пружины; ∆ x — указанное в условии задачи растяжение пружины.
Величина силы упругости, с другой стороны, совпадает с величиной приложенной силы:
Значение данной силы и величина растяжения пружины под действием этой силы позволяют рассчитать коэффициент жесткости составной пружины:
k общ = F Δ x = 12 4,0 ⋅ 10 − 2 = 300 Н/м.
Для определения коэффициентов жесткости каждой пружины запишем их коэффициенты жесткости в следующем виде:
так как указанные коэффициенты по условию задачи соотносятся между собой как
k 1 : k 2 : k 3 = 1 : 2 : 3.
Для расчета величины k запишем формулу для коэффициента жесткости пружины, состоящей из трех последовательно соединенных пружин, и подставим в нее выражения k 1 , k 2 , k 3 :
1 k общ = 1 k 1 + 1 k 2 + 1 k 3 = 1 k + 1 2 k + 1 3 k = 11 6 k , или k общ = 6 k 11 .
Найденное ранее значение k общ = 300 Н/м позволяет рассчитать k = 550 Н/м.
Тогда коэффициенты жесткости каждой из пружин имеют значения:
k 2 = 2 k = 1100 Н/м;
k 3 = 3 k = 1650 Н/м.
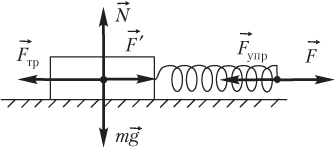
Пример 17. Вычислить абсолютную деформацию пружины с коэффициентом жесткости 100 Н/м, присоединенной к бруску, лежащему на горизонтальной поверхности, в момент начала скольжения бруска по поверхности. Сила, вызывающая скольжение бруска, прикладывается к пружине. Коэффициент трения между бруском и поверхностью равен 0,1. Масса бруска составляет 1,0 кг.
Решение. На рисунке показаны силы, действующие на брусок.
Абсолютную деформацию пружины рассчитаем по формуле
где F упр = F — модуль силы упругости, возникающей в пружине (величина силы упругости равна величине приложенной силы); k — коэффициент жесткости пружины.
Со стороны пружины на брусок действует сила, модуль которой совпадает с силой упругости:
В момент начала скольжения величина силы трения равна силе, приложенной к бруску в направлении движения:
где µ — коэффициент трения; N = mg — модуль силы нормальной реакции опоры.
Поэтому величина силы упругости может быть вычислена по формуле
Из исходного уравнения следует, что величина деформации пружины в момент начала скольжения определяется выражением
Расчет позволяет определить ее значение:
Δ x = 0,1 ⋅ 1,0 ⋅ 10 100 = 10 − 2 м = 1,0 см .
Пример 18. Вычислить массу груза, подвешенного к пружине жесткостью 250 Н/м, если известно, что относительная деформация пружины составляет 25 %. Длину нерастянутой пружины считать равной 100 мм.
Решение. Проиллюстрируем условие задачи рисунком.
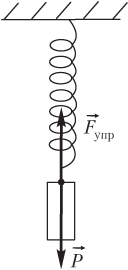
Сила упругости определяется формулой
где k — коэффициент жесткости (упругости) пружины; ∆ x = l − l 0 — абсолютная деформация пружины (величина ее растяжения под действием груза); l 0 — длина недеформированной пружины; l — длина пружины в деформированном состоянии.
Из определения относительной деформации
где ε = 0,25 — относительная деформация (в долях).
С учетом значения относительной деформации формула для вычисления силы упругости принимает вид:
F упр = k ε l 0 = 0,25 k l 0 .
С другой стороны, сила упругости, возникающая в пружине, численно равна весу тела, вызвавшего деформацию пружины:
где m — масса тела; g — модуль ускорения свободного падения.
Таким образом, имеем равенство
позволяющее вычислить массу груза, подвешенного к пружине:
m = 0,25 k l 0 g = 0,25 ⋅ 250 ⋅ 0,100 10 = 0,625 кг = 625 г .
Если пружины соединены параллельно, то деформация всех пружин одинакова и равна λ (рис.2а), нагрузка же, действующая на каждую из пружин, различна: на первую пружину действует сила P1, на вторую P2, и т.д., причем P1+P2+…+Pn=P.
Поэтому 
Или  т.е. жесткость системы параллельно соединенных пружин Kc равна сумме жесткостей Ki отдельных пружин.
т.е. жесткость системы параллельно соединенных пружин Kc равна сумме жесткостей Ki отдельных пружин.
При последовательном соединении пружин (рис.2б) одинаковой для всех пружин является сила нагрузки P, а общая деформация λ складывается из
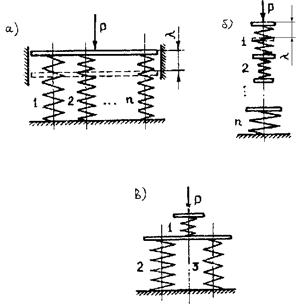 деформаций λ1, λ2,… ,λn, составляющих пружин.
деформаций λ1, λ2,… ,λn, составляющих пружин.
или 

Отсюда следует, что жесткость системы параллельно соединенных пружин больше жесткостей отдельных пружин, входящих в систему, а жесткость системы последовательно соединенных пружин, наоборот, меньше жесткостей пружин, составляющих эту систему.
Для определения внутренних силовых факторов в витке рассмотрим сечение пружины ( Рис.3).
При растяжении (или сжатии) винтовой цилиндрической пружины в любом поперечном сечении витка возникают крутящий и изгибающий моменты, поперечная и нормальная силы, но при малом угле подъёма винтовой оси проволоки напряжения и перемещения, вызываемые продольной силой и изгибающим моментом малы, и поэтому не учитываются.
Рассечем пружину плоскостью, перпендикулярной ее оси и рассмотрим равновесия отсеченной части пружины,
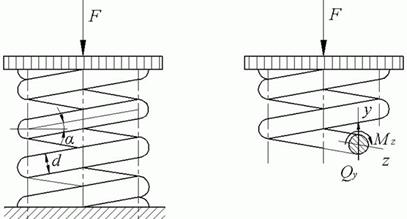
Из условия статического равновесия находим, что в поперечных сечениях пружины действуют внутренние силовые факторы в виде поперечного усилия Q=P и крутящего момента MKp=PDcp/2.
От действия усилия Q в поперечном сечении витка пружин возникают касательные напряжения сдвига (рис. 4а), которые равномерно распределены по сечению, площадью А. От действия крутящего момента MKp возникают касательные напряжения кручения (рис. 4б), суммируя напряжения, получаем эпюру суммарных напряжений (рис. 4в).
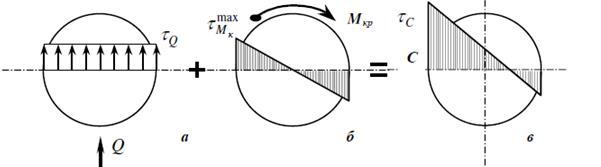

где τ1 – касательные напряжения сдвига
τ2 – касательные напряжения кручения
 ,
,
 ,
,
где Wp – полярный момент сопротивления сечения при кручении

Диаметр проволоки значительно меньше двух средних диаметров витка пружины, поэтому можно принять
Изменение продольных размеров (осадку) λ удобно определить энергетическим методом, приравнивая работу А приложенной силы Р и потенциальной энергии деформации U пружины. Работа внешних сил
 .
.
Потенциальная энергия накапливается, в основном, за счет кручения прутка и поэтому может быть определена

Учитывая, что крутящий Мк=PD/2 и момент инерции Ip=πd4/32 по длине проволоки не изменяются, а длина проволоки l = πdn, получаем

Приравнивая A и U, находим


Таким образом, при определении напряжений и перемещений в цилиндрических пружинах учитывают только действие крутящего момента.
Основными материалами пружин являются высокопрочная специальная пружинная проволока I, II и III классов диаметром 0,2. 5 мм, а также высокоуглеродистые стали 65, 70, марганцовистая сталь 65Г, кремнистая сталь 60С2А, хромованадиевая сталь 50ХФА и др.
Пружины, предназначенные для работы в химически активной среде, изготовляют из фосфористых БрОФ 6-0,15, БрОФ 4-0,2 и бериллиевой БрБ2 бронз.
3. УСТРОЙСТВО И ПРИНЦИП РАБОТЫ
Внешний вид установки представлен на рис. 5. В состав установки входят:
силовая рама с основанием (6) и (9), элементами горизонтирования (10), кронштейнами (11) и двумя траверсами, выполненных в виде подвижной и неподвижной планок (5);нагрузочные устройства с двумя подвесами (7) и наборами съемных грузов (8);две витые цилиндрические пружины сжатия (1);
два индикатора часового типа (2), указатели (3) и стандартная измерительная линейка (4).
Сжимающая сила создается при помощи съемных грузов. Масса одного груза – I кг. Максимальное число грузов на одну пружину – 5. На каждой ступени нагружения фиксируется упругое перемещение (осадка) пружины. Представлены две системы измерений: одна приближенная – измерительная линейка, другая уточненная – индикаторы часового типа.
 |
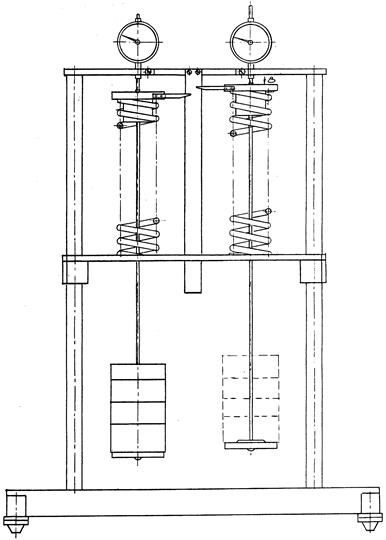
Рис. 5. Лабораторная установка МЗ
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Студент – человек, постоянно откладывающий неизбежность. 10178 –  | 7215 –
| 7215 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
к выполнению лабораторной работы 1.5
ОПРЕДЕЛЕНИЕ Жесткости Пружины и СИСТЕМЫ ПРУЖИН
Под действием внешних сил твердые тела могут деформироваться, то есть изменять свои размеры и форму. Если после прекращения действия внешних сил, вызвавших деформацию, тело принимает первоначальные размеры и форму, то деформацию называют упругой.
На пружину, изображенную на рисунке 7.1, действует направленная вертикально вниз сила  . Под действием этой силы пружина деформируется, и ее длина возрастает. Упругая сила
. Под действием этой силы пружина деформируется, и ее длина возрастает. Упругая сила  , возникающая в пружине вследствие ее деформации, уравновешивает внешнюю силу
, возникающая в пружине вследствие ее деформации, уравновешивает внешнюю силу  . Силы
. Силы  и
и  равны по модулю и направлены в противоположные стороны.
равны по модулю и направлены в противоположные стороны.
В соответствии с законом Гука при упругой деформации пружины
 ,
,
где k,  – жесткость пружины и изменение ее длины соответственно.
– жесткость пружины и изменение ее длины соответственно.
Жесткость пружины характеризует ее упругие свойства.
Р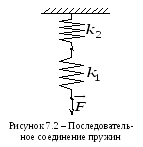 ассмотрим две пружины, соединенные последовательно, как это изображено на рисунке 7.2. Если к нижней пружине приложить направленную вертикально вниз внешнюю силу
ассмотрим две пружины, соединенные последовательно, как это изображено на рисунке 7.2. Если к нижней пружине приложить направленную вертикально вниз внешнюю силу  , то в соответствии с третьим законом Ньютона равная ей по модулю направленная вертикально вниз сила будет действовать и на вторую пружину со стороны первой.
, то в соответствии с третьим законом Ньютона равная ей по модулю направленная вертикально вниз сила будет действовать и на вторую пружину со стороны первой.
П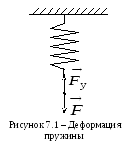 од действием силы
од действием силы  пружины деформируются. Пусть изменение длины первой пружины равно
пружины деформируются. Пусть изменение длины первой пружины равно  , а второй пружины –
, а второй пружины –  . Тогда в соответствии с законом Гука
. Тогда в соответствии с законом Гука
 ,
,
 ,
,
где  – жесткость первой и второй пружин соответственно.
– жесткость первой и второй пружин соответственно.
Жесткость системы двух последовательно соединенных пружин
 ,
,
Подставляя в это выражение значения  и
и  из формул (7.1) и (7.2), получаем
из формул (7.1) и (7.2), получаем
 ,
,
В общем случае при последовательном соединении n пружин
 ,
,
где  – жесткость
– жесткость  -й пружины.
-й пружины.
Н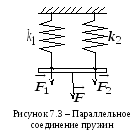 а рисунке 7.3 изображены две параллельно соединенные пружины, нижние концы которых закреплены на горизонтальной перемычке. Если на перемычку подействовать направленной вертикально вниз силой
а рисунке 7.3 изображены две параллельно соединенные пружины, нижние концы которых закреплены на горизонтальной перемычке. Если на перемычку подействовать направленной вертикально вниз силой  , то произойдет деформация пружин. Со стороны перемычки на первую пружину будет действовать сила
, то произойдет деформация пружин. Со стороны перемычки на первую пружину будет действовать сила  , а на вторую пружину – сила
, а на вторую пружину – сила  . В соответствии с законом Гука
. В соответствии с законом Гука
 ,
,
 ,
,
где  ,
,  – жесткость первой и второй пружин соответственно;
– жесткость первой и второй пружин соответственно;  – изменение длины каждой из пружин.
– изменение длины каждой из пружин.
Жесткость системы двух параллельно соединенных пружин
 .
.
Так как  , то, подставляя значения
, то, подставляя значения  и
и  из формул (7.5) и (7.6), получаем
из формул (7.5) и (7.6), получаем
 ,
,
В общем случае при параллельном соединении n пружин
 ,
,
где  – жесткость
– жесткость  -й пружины.
-й пружины.
В лабораторной работе экспериментально определяется жесткость пружины и системы пружин. Схема экспериментальной установки изображена на рисунке 7.4.
Один конец пружины закреплен на основании стойки, а второй ее конец соединен с нитью. Нить перекинута через шкив, установленный в верхней части стойки, а свободный конец нити соединен с подвесом массой  . На пружину со стороны нити действует сила
. На пружину со стороны нити действует сила
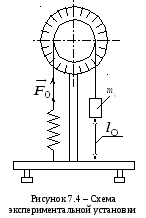 .
.
Расстояние от основания стойки до нижнего торца подвеса равно l . Установка на подвес дополнительного груза массой m приводит к изменению длины пружины на величину
 ,
,
где l – расстояние от основания стойки до нижнего торца подвеса после установки на него груза массой m.
Увеличение массы подвешенного груза приводит к появлению дополнительной силы, действующей на пружину:
 .
.
С другой стороны в соответствии с законом Гука
 .
.
Приравниваем правые части двух последних формул и выражаем жесткость пружины
 .
.
Порядок выполнения работы и обработки результатов измерений
ознакомиться с устройством экспериментальной установки, записать перечень приборов и принадлежностей и их характеристики в отчет о лабораторной работе.
Выполнить опыты поочередно с двумя пружинами, имеющими различную жесткость. Для этого один конец пружины закрепить на основании стойки, а другой ее конец соединить с нитью. Нить перекинуть через шкив, установленный в верхней части стойки, и свободный конец нити соединить с подвесом массой m. С помощью линейки измерить расстояние l от основания стойки до нижнего торца подвеса. Установить на подвес дополнительный груз массой m и измерить изменившееся расстояние l от основания стойки до нижнего торца подвеса. Рассчитать изменение длины пружины по формуле (7.8), а затем жесткость пружины по формуле (7.9). Повторить измерения не менее четырех раз, устанавливая на подвес дополнительные грузы. Полученные данные записать в таблицу 7.1, а затем выполнить аналогичные опыты со второй пружиной.
Изменение длины пружины можно также рассчитывать по формуле
 ,
,
где R – радиус шкива (R = 25,0 мм);  – угол поворота шкива при установке на подвес дополнительного груза.
– угол поворота шкива при установке на подвес дополнительного груза.
Угол поворота шкива можно определить по выражению
 ,
,
где  ,
,  – угловая координата шкива до и после установки на подвес дополнительного груза соответственно.
– угловая координата шкива до и после установки на подвес дополнительного груза соответственно.
Угловые координаты шкива определяют по шкале с ценой деления 5. Если изменение длины пружины рассчитывается по формуле (7.10), то в таблицу вместо l и l записывают значения  и
и  .
.